

Της Ταξιαρχίας Κοζπή,
Στη σύγχρονη εποχή, η αξιοσημείωτη πρόοδος της τεχνητής νοημοσύνης αποτελεί τον ακρογωνιαίο λίθο για την εξέλιξη της τεχνολογίας και της επιστήμης. Οι τελευταίες, με τη σειρά τους, έχουν οδηγήσει στην άνθιση ιδιαίτερα σημαντικών καινοτομιών. Οι εφαρμογές της τεχνητής νοημοσύνης έχουν διεισδύσει σε ποικίλους τομείς της σύγχρονης πραγματικότητας, μην αφήνοντας ανεπηρέαστο και τον τομέα της υγείας. Ιδιαίτερη αναγνώριση και ανταπόκριση έχουν λάβει οι εφαρμογές που σχετίζονται με την ρομποτική. Η ρομποτική, ως επιστήμη που μελετά τη μορφολογία και τη λειτουργία των αυτοματοποιημένων μηχανών που ονομάζονται ρομπότ, συναντάται πλέον και στον κλάδο της υγείας, με τη ρομποτική ιατρική να διαμορφώνει ένα ελπιδοφόρο μέλλον για αποτελεσματικότερη θεραπεία και πρόληψη ασθενειών, αλλά και για την καλύτερη δυνατή αποκατάσταση των ασθενών.
Με τον όρο ρομποτική χειρουργική ή ρομποτικά υποβοηθούμενη χειρουργική περιγράφεται η διεξαγωγή χειρουργικών επεμβάσεων με τη βοήθεια ρομποτικών συστημάτων. Στην ιατρική πρακτική, η ρομποτική εμφανίζεται σε όλες σχεδόν τις ειδικότητες της χειρουργικής επιστήμης συμπεριλαμβανομένης της καρδιοχειρουργικής, της γενικής χειρουργικής, της ορθοπεδικής χειρουργικής και της ουρολογικής αντίστοιχα. Αξίζει να τονιστεί ότι στόχος της δεν αποτελεί η αντικατάσταση του χειρουργού αλλά η βελτιστοποίηση των ικανοτήτων του, καθώς και η μέγιστη αποτελεσματικότητα της επέμβασης μέσω της εξάλειψης των αδυναμιών του. Τα ρομποτικά συστήματα ουσιαστικά αποτελούν μια προέκταση του χειρουργού, καθώς ο ίδιος τα χειρίζεται σε διαφορετικό βαθμό ανάλογα με τις ανάγκες της κάθε επέμβασης. Γίνεται, λοιπόν, αντιληπτή η ιδιαίτερη προσοχή που οφείλει να επιδείξει ο χειρουργός καθώς καλείται τόσο να συντονίζει και να ελέγχει το μηχανικό σύστημα όσο και να εκτελεί την ιατρική πράξη.

Στα μέσα της δεκαετίας του 1980, το PUMA (Programmable Universal Machine for Assembly), σύμφωνα με την επικρατέστερη άποψη, αποτέλεσε το πρώτο ρομποτικό σύστημα που χρησιμοποιήθηκε στην ιατρική. Το PUMA 560, ως μία τροποποιημένη μορφή του PUMA ήταν ένας ρομποτικός βραχίονας, η τεχνολογία του οποίου προσέφερε μεγαλύτερη ακρίβεια στη βιοψία εγκεφάλου ενώ παράλληλα χρησιμοποιήθηκε και για επέμβαση διουρηθρικής εκτομής προστάτη. Το PROBOT διαδέχτηκε το PUMA 560 και αναπτύχθηκε το 1988 στο Imperial College του Λονδίνου σε συνεργασία με την εταιρεία Integrated Surgical Supplies Ltd. Προσέδιδε βοήθεια αποκλειστικά για την διεξαγωγή ουρολογικών επεμβάσεων εκτομής προστάτη (επέμβαση transurethral resection of the prostate-TUPR) μέσω μίας περιστρεφόμενης λεπίδας. Η λεπίδα του PROBOT έκανε εκτομή του σημείου του προστάτη που έπρεπε να αφαιρεθεί, με μεγάλη ακρίβεια. Να σημειωθεί ότι τελικά το PROBOT δεν καθιερώθηκε στις χειρουργικές επεμβάσεις. Το 1992 η εταιρεία Integrated Surgical Systems δημιούργησε, το καθοδηγούμενο από υπολογιστή, ρομποτικό σύστημα ROBODOC προκειμένου να υποβοηθήσει την αρθροπλαστική ισχίου. Είναι το πρώτο χειρουργικό σύστημα που συνέβαλλε στην διεξαγωγή ορθοπεδικών επεμβάσεων καθώς και το πρώτο που έλαβε επίσημη έγκριση από τον Αμερικανικό Οργανισμό Τροφίμων και Φαρμάκων (FDA), μόλις το 2008.
Τα παραπάνω ρομποτικά συστήματα δεν υιοθετήθηκαν από τους χειρουργούς και αυτό, καθώς ο σχεδιασμός τους εστίαζε σε πολύ συγκεκριμένες ενέργειες, μη παρέχοντας υποβοήθηση ολόκληρης της χειρουργικής επέμβασης. Η ρομποτική χειρουργική αναγνωρίστηκε και εξελίχθηκε μέσω της τηλεχειρουργικής. Συγκεκριμένα, η NASA αλλά και ο αμερικανικός στρατός επιθυμούσαν την πραγματοποίηση χειρουργικών επεμβάσεων εξ αποστάσεως, πόσο μάλλον για την περίπτωση της NASA, όπου οι αστροναύτες που βρίσκονταν στο διάστημα θα εγχειρίζονταν από γιατρούς στη γη. Βάσει αυτών των επιθυμιών χρηματοδοτήθηκαν και εν τέλη διεξήχθησαν σπουδαίες έρευνες μέχρι να καταλήξουμε στο σήμερα με τα σύγχρονα ρομποτικά συστήματα όπως τα ZEUS και DaVinci. Το σύστημα DaVinci έφερε την επανάσταση στον τομέα της ρομποτικής χειρουργικής, λαμβάνοντας άδεια το 2000 από τον FDA και από τότε πολλές παραλλαγές του χρησιμοποιούνται σε επεμβάσεις. Η πρώτη χειρουργική επέμβαση που πραγματοποιήθηκε με το ρομποτικό σύστημα DaVinci έλαβε χώρα στο Βέλγιο το 1997 και αφορούσε χολοκυστεκτομή, ενώ το 2006 πραγματοποιήθηκε και στην Ελλάδα η πρώτη επέμβαση με τη χρήση του συγκεκριμένου ρομποτικού μηχανισμού.

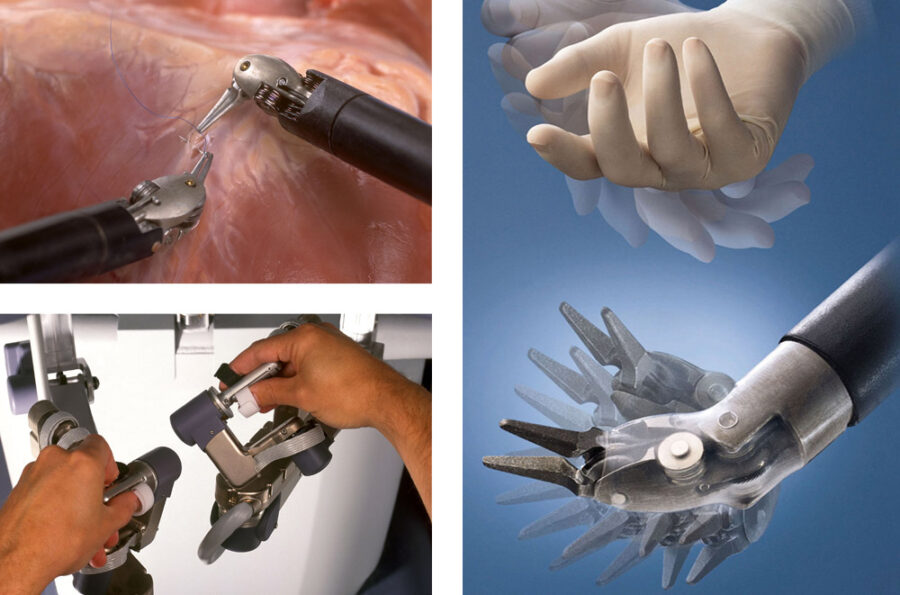
Μέσω των δύο συστημάτων, ZEUS και DaVinci, η τηλεχειρουργική έγινε πράξη. Το 2001 εκτελέστηκε η πρώτη αμιγώς τηλεχειρουργική επέμβαση από γιατρό που βρισκόταν στην Νέα Υόρκη με 68χρονη ασθενή που βρισκόταν στο Στρασβούργο της Γαλλίας. Ειδικότερα, η επέμβαση ήταν χολοκυστεκτομής και είχε μεγάλη επιτυχία. Ιστορικά είναι γνωστή με το όνομα Lindbergh. Η συγκεκριμένη επέμβαση έγινε μέσω της τεχνολογίας ZEUS. Το ρομποτικό σύστημα DaVinci επικρατεί στη σύγχρονη εποχή, αποτελούμενο από ρομποτικούς βραχίονες, την χειρουργική κονσόλα και τον ενδοσκοπικό πύργο. Ο χειρουργός κάθεται μπροστά από την κονσόλα και κατευθύνει τους ρομποτικούς βραχίονες, στα άκρα των οποίων βρίσκονται τα χειρουργικά εργαλεία. Αξιοσημείωτη είναι η ύπαρξη ειδικού φίλτρου, που περιορίζει τον φυσικό τρόμο των χεριών του χειρουργού. Ο ενδοσκοπικός πύργος με τη σειρά του συντονίζει τα στοιχεία του περίπλοκου αυτού συστήματος, μέσω της παραγωγής ενέργειας. Επίσης, διαθέτει οθόνη η οποία δίνει τη δυνατότητα ζωντανής παρακολούθησης των αγγείων, της ροής του αίματος και του ιστού.
Τα ρομποτικά χειρουργικά συστήματα διαχωρίζονται σε τρεις κύριες κατηγορίες: ενεργητικά, ημιερνεργητικά και παθητικά συστήματα, ανάλογα με τον βαθμό εξάρτησης τους από τον χειρουργό. Τα ενεργητικά συστήματα είναι αυτόνομα και αφορούν συγκεκριμένες φάσεις μιας επέμβασης, όπως το PROBOT και το ROBODOC. Αντιθέτως, τα παθητικά εξαρτώνται εξ ολοκλήρου από το χειρουργό. Πλέον υπάρχουν και πιο εξειδικευμένα συστήματα όπως αυτά του τύπου Master-Slave-χειρουργικής υποβοήθησης. Στην κατηγορία αυτή υπάγεται και το ρομποτικό σύστημα DaVinci, η τεχνολογία του οποίου αναφέρθηκε προηγουμένως.

Η ρομποτική χειρουργική εμφανίζει ποικίλα πλεονεκτήματα έναντι των κλασσικών μεθόδων. Είναι μία ελάχιστα επεμβατική καθώς και τραυματική μέθοδος, λόγω της ακρίβειας με την οποία γίνονται οι κινήσεις του ιατρού. Εξασφαλίζει κατά αυτό τον τρόπο μικρότερο πόνο καθώς και ελάχιστη απώλεια αίματος. Επιπρόσθετα, οι διεγχειρητικές και μετεγχειρητικές επιπλοκές ελαχιστοποιούνται. Η ρομποτική χειρουργική δίνει τη δυνατότητα στο χειρουργό να πραγματοποιήσει δύσκολους χειρισμούς με μεγάλη ακρίβεια. Τα ρομποτικά συστήματα είναι ικανά να περιστρέφονται σε γωνία 360ο μοιρών μέσα στο χειρουργικό πεδίο και προσφέρουν την τρισδιάστατη εικόνα (3D), αυτού του πεδίου.
Η επιστήμη, όμως, δεν είναι αψεγάδιαστη και ακόμα και μία εξελιγμένη ρομποτική συσκευή παρουσιάζει μειονεκτήματα. Το βασικότερο ίσως είναι το πολύ μεγάλο κόστος απόκτησης του ρομποτικού συστήματος (ενδεικτικά για το σύστημα DaVinci απαιτείται το χρηματικό ποσό των 1.500.000-1.700.000 ευρώ). Δυστυχώς, μέσα σε αυτό το ποσό δεν συμπεριλαμβάνεται το κόστος συντήρησης των μηχανημάτων. Ως απόρροια του πανάκριβού αυτού εξοπλισμού οι ρομποτικές χειρουργικές επεμβάσεις είναι ιδιαίτερα δαπανηρές. Τα προβλήματα συνεχίζονται και στο πρακτικό κομμάτι με τα ρομποτικά συστήματα να έχουν ιδιαίτερα ογκώδη σχήμα και να καταλαμβάνουν μεγάλο χώρο στην ήδη φορτωμένη με μηχανήματα χειρουργική αίθουσα. Εξίσου σημαντικό να τονιστεί, η απώλεια απτικής αίσθησης από τη μεριά του χειρουργού. Ο ίδιος δεν έχει την δυνατότητα να έρθει σε άμεση επαφή με τον ασθενή και ως εκ τούτου δεν μπορεί να γνωρίζει την ένταση της δύναμης που ασκεί στους ιστούς του ασθενούς. Για το λόγο αυτό οι ρομποτικές χειρουργικές επεμβάσεις απαιτούν πολύ περισσότερο χρόνο από μία απλή επέμβαση. Όπως κάθε μηχανικό σύστημα είναι εφικτό να φθαρεί ή να δυσλειτουργήσει, έτσι και τα συγκεκριμένα συστήματα δύναται να παρουσιάσουν βλάβη ή δυσλειτουργία. Εάν το ρομποτικό σύστημα σταματήσει να λειτουργεί, απλά απομακρύνεται από τη χειρουργική τράπεζα και η επέμβαση συνεχίζεται κανονικά με ολιγόλεπτη καθυστέρηση.
Παρά τα παραπάνω και σύμφωνα με τα προτερήματα που έχουν παρουσιαστεί, η ρομποτικά υποβοηθούμενη χειρουργική αναφέρεται γενικά ως ασφαλής μέθοδος, με τα ποσοστά ανεπιθύμητων περιστατικών να ανέρχονται σε ποσοστό 10% για επιπλοκές του ασθενούς και 0.1-0.5% για δυσλειτουργία του ρομποτικού συστήματος. Ωστόσο, οι επιπλοκές που στηρίζονται σε βλάβη του συστήματος παρουσιάζουν μεγαλύτερα ποσοστά σωματικής βλάβης του ασθενούς: 4.8%-46.6%.
Καταληκτικά, η ρομποτικά υποβοηθούμενη χειρουργική συμβάλλει στην ανάπτυξη της χειρουργικής, με τα ρομποτικά συστήματα να υπόσχονται μεγαλύτερη βελτίωση και αποτελεσματικότητα. Παρόλα αυτά, το μέλλον θα δείξει αν αυτή η καινοτόμα και επαναστατική τεχνολογία θα κριθεί κατάλληλη και θα αντικαταστήσει ολοκληρωτικά τις συμβατικές επεμβάσεις. Σε μία τέτοια περίπτωση πρέπει να εξετασθούν και ορισμένα ζητήματα βιοηθικής, ώστε οι επεμβάσεις αυτού του είδους να διενεργούνται με σεβασμό ως προς την αξιοπρέπεια και τα δικαιώματα τόσο του χειρουργού όσο και του ασθενούς.
Μπορείτε να βρείτε περισσότερες πληροφορίες σχετικά με το ρομποτικό σύστημα DaVinci σε αυτό το σύνδεσμο καθώς και για τη διαδικασία μίας ρομποτικής χειρουργικής επέμβασης εδώ.
ΕΝΔΕΙΚΤΙΚΕΣ ΠΗΓΕΣ
- Τι είναι το σύστημα χειρουργικής Da Vinci;, Γενική Χειρουργική, Όμιλος Ευρωκλινικής euroclinic.gr, Διαθέσιμο εδώ
- B. Morris (2005), Robotic Surgery: Applications, Limitations, and Impact on Surgical Education, Medscape General Medicine. Δημοσιευμένο εδώ
- M. D’ Souza – J. Gendreau- A. Feng – L.H Kim – A.G Ho – A. Veeravagu (2019), Robotic-Assisted Spine Surgery: History Efficacy, Cost And Future Trends, Robotic Surgery: Research and Reviews: 6, σελίδες 9-23. National Library of Medicine, National Institutes of Health. Διαθέσιμο εδώ
- B.T. Carpenter, C.P. Sundaram (2017), Training the next generation of surgeons in robotic surgery, σελίδα 39-44. National Library of Medicine, National Institutes of Health. Διαθέσιμο εδώ
- N.G. Hockstein, C.G. Gourin, R.A. Faust, D.J. Terris (2007), A history of robots: from science fiction to surgical robotics, National Library of Medicine, National Institutes of Health, σελίδες 113-118. Διαθέσιμο εδώ
- E. I. George – T. C. Brand – A. LaPorta – J. Marescaux – R. M. Satava (2018), Origins of Robotic Surgery: From Skepticism to Standard of Care, Journal of the Society of Laparoscopic & Robotic Surgeons, National Library of Medicine, National Institutes of Health Volume 22, Issue 4, Article e2018.00039. Διαθέσιμο εδώ

